

 联系我们
联系我们
爱普生机器人的Weight参数设定具体教程

声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
为了充分发挥爱普生机器人自身具备的性能,请将负载(夹具末端重量+工件重量)与负载的装载惯性设为额定值以内,勿使其从第4关节中心产生偏心(离心)。
但在负载或装载惯性超过额定值而不可避免地产生偏心(离心)时,请根据“基本篇:
4.3.1 Weight设定”和“4.3.2 Inertia设定”中的步骤设定参数。
通过合理的设定,可优化机器人的PTP动作,抑制振动,缩短作业时间,提高对较大负载的对应能力。另外,对夹具末端与工件的装载惯性较大时产生的持续振动也具有抑制效果。

4.3.1 Weight设定
注意
■ 请务必使夹具末端+工件的重量不超过T3: 3kg / T6: 6kg。T3系列爱普生机器人设计的工作负载不超过T3: 3kg / T6: 6kg。
另外,请务必设定适合负载的值。如果在夹具末端Weight参数中设定小于实际负载的值,则可能会导致发生错误或冲击,这不仅不能充分发挥性能,而且还可能缩短各机构部件的使用寿命或因皮带齿轮跳动发生位置间隙的可能性。
T系列的容许负载(夹具末端和工件):
T3: 额定1 kg,*大3 kg
T6: 额定2 kg,*大6 kg
负载(夹具末端重量+工件重量)超过额定值时,请变更Weight参数的设定。
如果进行设定变更,则根据“Weight参数”自动补偿机器人PTP动作时的*大加/减速度。
轴上安装负载物的重量
轴上安装的负载(夹具末端重量+工件重量)可通过Weight参数设定。
在[Tools]-[Robot Manager]-[Inertia]面板-[Load inertia:]文本框中进行设定。(也可以在[Command Window]中利用Inertia命令进行设定。)
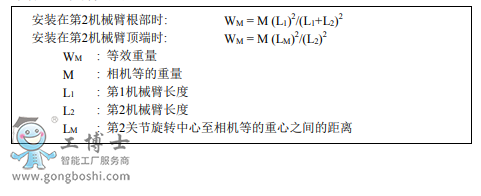
机械臂上安装负载的重量
在机械臂上安装相机、气动阀等情况下,将其重量换算为轴的等效重量,加到负载重量中,然后设定“Weight参数
更多资讯:爱普生机器人