

 联系我们
联系我们
爱普生机器人:外围设施、远程控制 、紧急停止安全操作
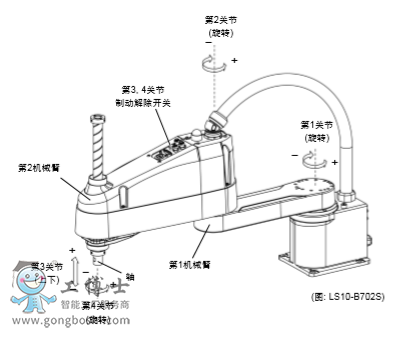
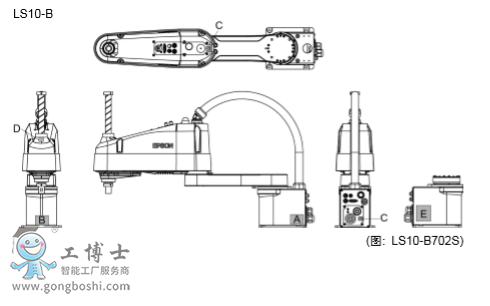
EPSON LS10结构图
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除。
EPSON LS10结构图
外围装置设计设计爱普生机器人系统中移除及供给零件和材料的装置时,请确保设计能充分保 证作业人员的安全。如果需要在移除及供给材料时不停止机器人,请安装 穿梭车或采取其他措施以确保作业人员不需要进入有潜在危险的区域。 确保中断外围装置供电(切断电源)不会导致危险情况。不仅需要采取措施 防止“夹具末端设计”中提到的工件松开,也需确保除机器人以外的外围装 置能安全停止。请确认装置的安全性以确保电源切断时该区域是安全的。
远程控制 为了防止由于远程控制可能出现的危险,仅控制设备设为REMOTE、示教 模式为OFF且系统设定为接受遥控信号时,REMOTE的开始信号有效。此 外,远程有效时,只有远程的动作命令和I/O输出可用。为了整个系统的安 全性,还需要采取安全措施,消除由于远程控制可能造成的与外围装置启 动和停止相关的隐患。
外围设施、远程控制 、紧急停止安全操作
EPSON LS10结构图
EPSON LS10结构图
紧急停止 各机器人系统需要设有使作业人员能立即停止系统动作的装置。请利用控 制器和所有其他装置的紧急停止输入,安装紧急停止装置。
紧急停止时,驱动爱普生机器人的电机供电电源被切断,机器人由于动态制动停 止。
发生紧急情况时,请务必通过紧急停止电路将关闭电源的所有外部组件关 闭。请勿设计成使用所有I/O板输出关闭爱普生机器人控制器。例如,当I/O板发 生故障时,控制器将无法关闭外部组件电源。控制器上的紧急停止应连线 至机器人以切断电机电源,而非外部电源。 有关安全护板系统的详细信息,请参阅以下章节。 1.5 紧急停止